センシングとモーションコントロールに関する研究
ものづくり(ロボット)
| 研究者 |
工学部 機械工学科 知能機械コース/航空宇宙生産技術開発センター 伊藤和晃 教 授 |
|---|
研究概要
生産年齢人口が急速に減少する中で高度ものづくり社会を持続するには生産性向上が不可欠です。製造装置や組立装置,ロボットなどメカトロニクス機器の性能を着実にかつ継続して向上させていく必要があります。
当研究室では,メカトロニクス機器の位置決めや力制御性能向上に必要なモーションコントロール技術,触覚センサ・画像認識等のセンシング技術、人工知能のメカトロ応用に関する研究開発に取り組んでいます。また,社会実装に向けて高精度加工ロボット(ドリル穿孔,バリ取り)や,組付ロボット(ワイヤリング,接着剤塗布)の実証研究を行っています。
研究内容
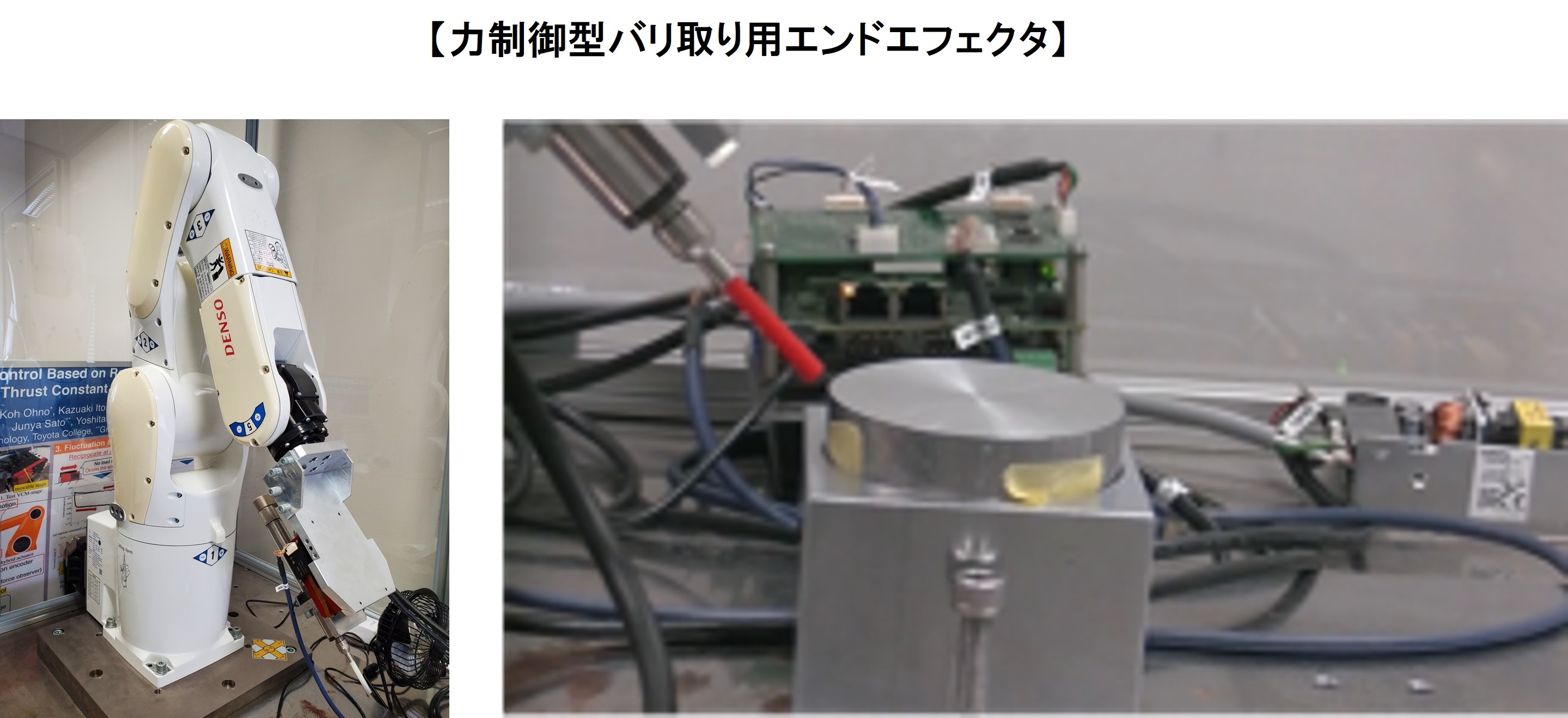
(1)高精度バリ取りロボット
・位置決め精度の低いロボットアームを用いて数ミクロン単位の高精度バリ取りを実現するためには,ロボット+力覚センサ
では不十分
・高い精度で加工力を制御できる研究室独自の力制御型エンドエフェクタを開発
・力覚センサを用いることなく,回転ブラシの押付力(加工反力)を高速かつ高精度に推定することにより、力覚センサの
使用時よりも広帯域での力制御が可能
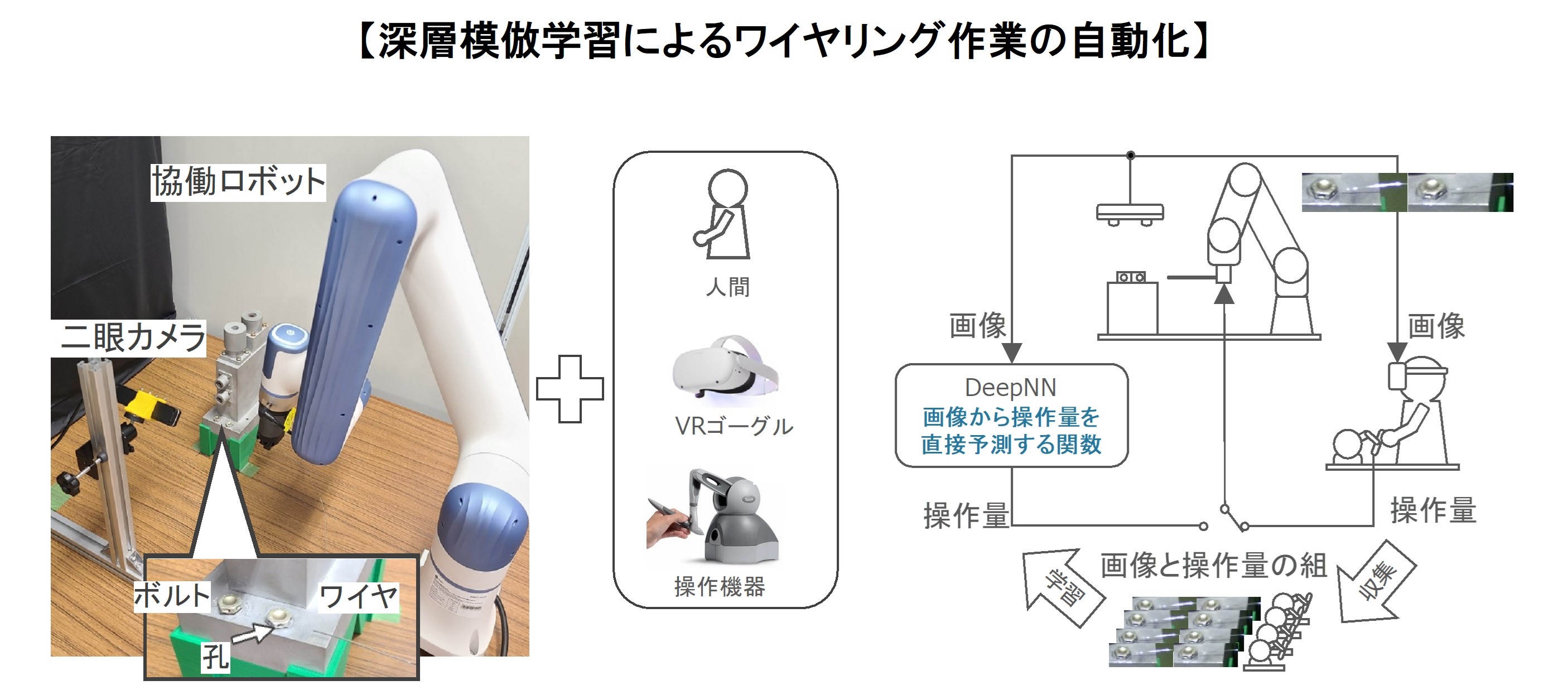
(2)深層模倣学習によるワイヤリング作業の自動化(情報コース 加藤研との共同研究)
・ボルト角は全て異なり,ワイヤはたわみにより先端の位置・姿勢が変わるため,ロボット動作を全てプログラムで記述
するのは困難
・二眼カメラの映像を見ながらロボットを操作し,挿入が成功した際の「画像と操作量の組」を用いて深層学習モデルを
作成 ⇒ 学習後はロボットが自らワイヤ挿入可能に
・今後は引き抜き作業や捻り作業への拡張を進めてワイヤリング全体の自動化を目指す
資料・ポスター
キーワード
メカトロニクス、モーションコントロール、センシング、画像認識、AI産業用ロボット、 自動化、「匠の技術」の形式化、高精度加工ロボット
出展した展示会
研究者の詳細につきましては、岐阜大学 教員紹介冊子「さんかんがく」をご覧ください。