ものづくりを支える高性能モーションコントローラの研究
ものづくり(ロボット)
| 研究者 |
工学部 機械工学科 伊藤和晃 教授 |
|---|
研究概要
メカトロニクス機器(テーブル装置やロボット等)の位置や速度、力を制御する技術を総称してモーションコントロール(運動制御)技術と呼びます。機器の高速化・高精度化は生産効率や製品の品質に直結します。力を高精度に制御できれば人間とロボットの共同作業範囲も広がります。遠隔制御、「巧の技術」の保存・再生、故障診断などにも応用可能です。
研究内容
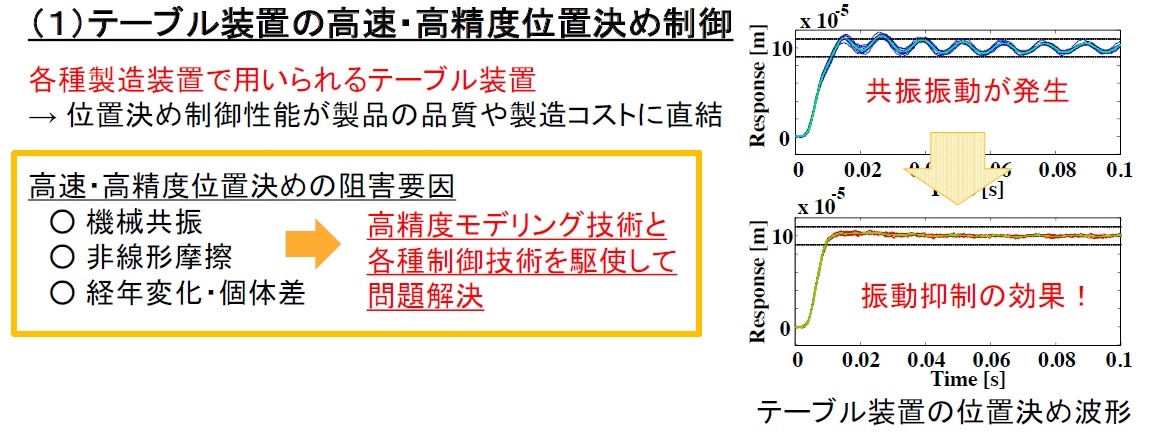
(1)テーブル装置の高速・高精度位置決め制御
各種製造装置で用いられるテーブル装置
→ 位置決め制御性能が製品の品質や製造コストに直結
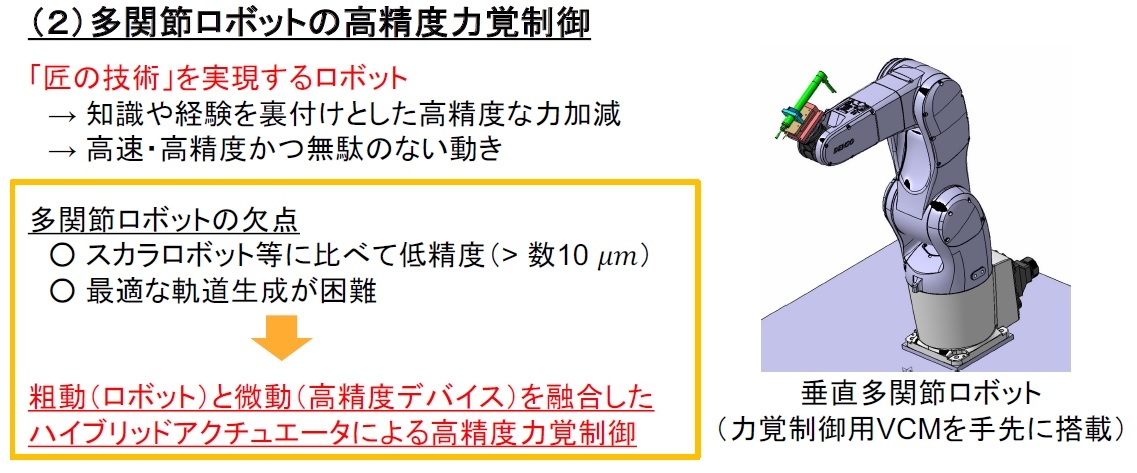
(2)多関節ロボットの高精度力覚制御
「匠の技術」を実現するロボット
→ 知識や経験を裏付けとした高精度な力加減
→ 高速・高精度かつ無駄のない動き
活用分野・用途・応用例・商品例・事業化のイメージなど
- テーブル装置・垂直多関節ロボットなどの高速・高精度位置決め制御
- 高精度力覚制御を生かした人間協調ロボット開発
- 双方向での力覚通信機能を備えた遠隔操縦ロボット開発
- 経時・経年変化時のオートチューニング
- リアルタイム外乱モニタリングによる故障診断/消耗診断 など
資料・ポスター
キーワード
メカトロニクス機器、モーションコントロール、運動制御、力覚制御、多関節ロボット
出展した展示会
研究者の詳細につきましては、岐阜大学 教員紹介冊子「さんかんがく」をご覧ください。