ロボットによる自動組立の知能化・高度化
ものづくり(ロボット)
| 研究者 |
工学部 機械工学科 山田貴孝 教授 |
|---|
研究概要
機械・ロボットで様々な作業を実現し、生産技術・自動化技術の知能化・高度化を目指しています。
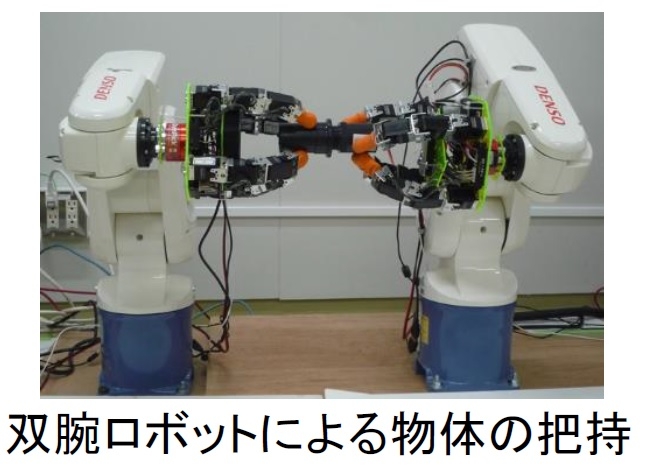
多指ロボットハンドによる器用なハンドリング
ロボットによる自動組立と接触状態の知的検出
研究内容
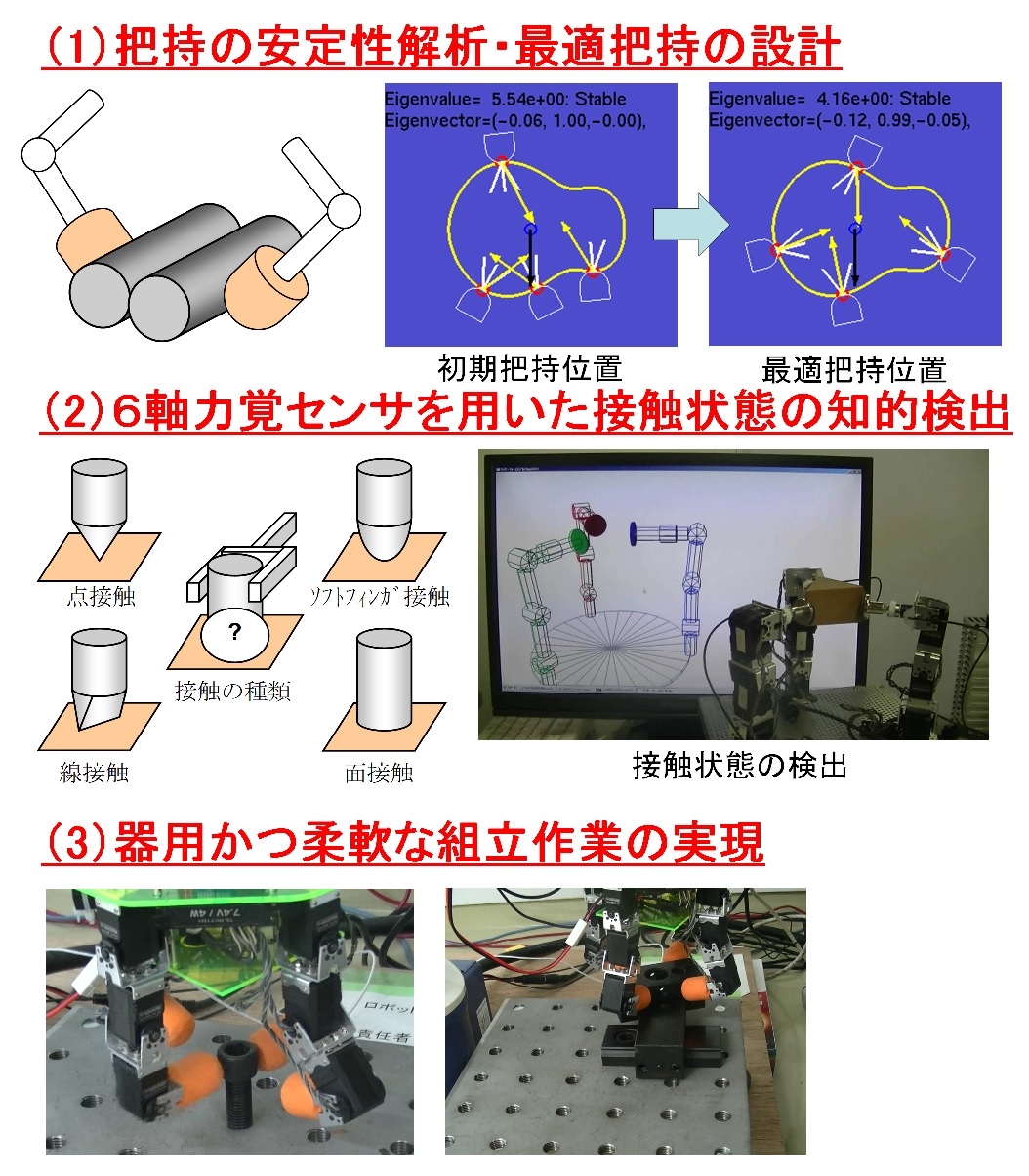
(1)把持の安定性解析・最適把持の設計
多指ハンドで様々な形状の部品を器用にハンドリングすることを目指し、把持の安定性の解析、最適把持の設計を行います。
(2)6軸力覚センサを用いた接触状態の知的検出
組立作業では、複雑かつ多様な接触状態を生じます。6軸力覚センサを利用して判別し、接触状態に応じて柔軟に作業を実現することを目指します。
(3)器用かつ柔軟な組立作業の実現製品や治具は様々な部品から構成されています。ロボットによる器用かつ柔軟な組立作業の実現を目指します。
活用分野・用途・応用例・商品例・事業化のイメージなど
- ロボットによるハンドリングと自動組立
- 治具配置の最適化
- 組付け時の接触状態の検出
- ロボットの指先、足先などで生じる接触状態の検出
資料・ポスター
キーワード
ロボット、生産技術、自動化、多指ロボットハンド、自動組み立て、最適把持、6軸力覚センサー
出展した展示会
研究者の詳細につきましては、岐阜大学 教員紹介冊子「さんかんがく」をご覧ください。