人間らしい外観の筋電義手の研究開発
ものづくり(ロボット)
| 研究者 |
工学部 機械工学科 毛利哲也 教授 |
|---|
研究概要
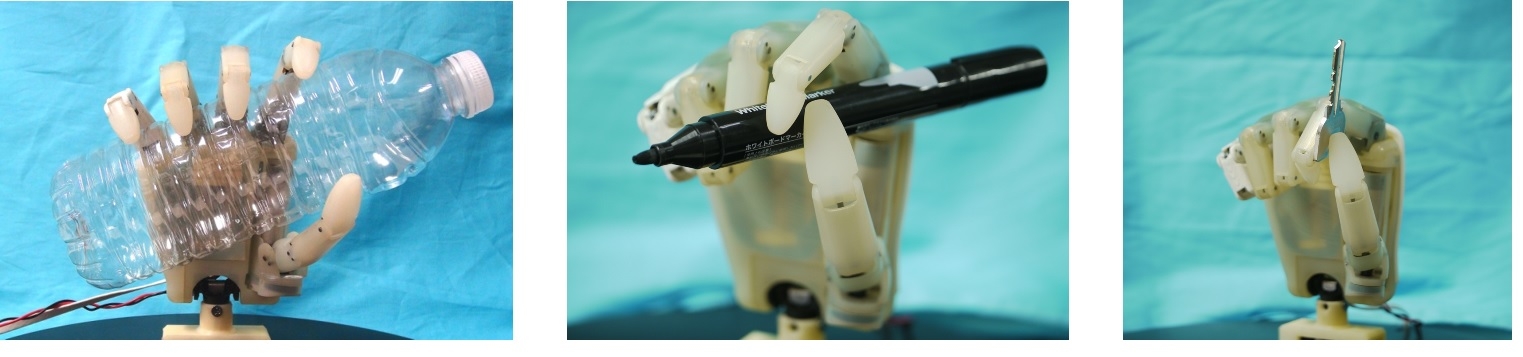
多くの機能と人間らしい外観を兼ね備えた筋電義手を研究開発しています.生体信号により色々な物を握れます.
研究内容
(1)機構
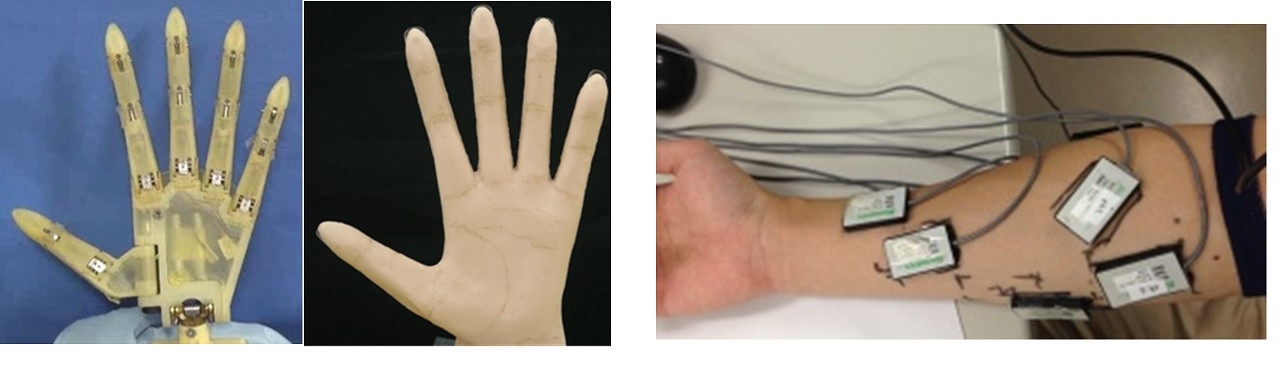
色々な形の物を握るために新しい機構を考えて,小さくて軽い筋電義手を開発しています.
(2)制御
腕の表面筋電位や音声により手指のパターンと関節角度を高精度に再現する制御方式を新しく開発しています.
活用分野・用途・応用例・商品例・事業化のイメージなど
ロボット分野 (産業用,生活支援用,ヒューマノイド)
アミューズメント分野 (入出力デバイス)
資料・ポスター
キーワード
筋電義手、表面筋電位、音声、関節角度
出展した展示会
研究者の詳細につきましては、岐阜大学 教員紹介冊子「さんかんがく」をご覧ください。